
Homepage
Biography
I am a first-year MS student at CMU RI, working at LeCAR Lab advised by Prof. Guanya Shi.
Previously, I received my B.Eng. from Shanghai Jiao Tong University (SJTU), where I was advised by Prof. Hesheng Wang and Prof. Danping Zou. After that, I worked with Prof. Richard Ren remotely during a summer research. Subsequently, I worked with Prof. Huazhe Xu as a research assistant at Tsinghua University (IIS).
During my undergraduate career, I led the programming group at SJTU VEX Robotics Club.
News
- [2025.04.11] ASAP and Flying Hand are accepted to RSS 2025.
- [2025.03.18] I will join Amazon Frontier AI & Robotics Team as an Applied Scientist Intern this summer.
- [2025.01.29] Catch It! is accepted to ICRA 2025.
Education
Carnegie Mellon University Aug. 2024 - Present
Master Student
Major: Robotic Systems Development
Master Student
Major: Robotic Systems Development

Shanghai Jiao Tong University Sep. 2019 - Jun. 2023
Undergraduate Student
Major: Automation
Undergraduate Student
Major: Automation
Experience
Graduate Research Assistant Oct. 2024 - Present
Learning and Control for Agile Robotics Lab (LeCAR Lab)
Advisor: Prof. Guanya Shi
Topic: Humanoid & Aerial Manipulation
Learning and Control for Agile Robotics Lab (LeCAR Lab)
Advisor: Prof. Guanya Shi
Topic: Humanoid & Aerial Manipulation

Full-time Research Assistant Jan. 2024 - Jul. 2024
Tsinghua Embodied AI Lab (TEA Lab)
Advisor: Prof. Huazhe Xu
Topic: Mobile Manipulation
Tsinghua Embodied AI Lab (TEA Lab)
Advisor: Prof. Huazhe Xu
Topic: Mobile Manipulation

Research Intern (Remote) Summer 2023
Robotics Autonomy and Planning Lab at SJTU
Advisor: Prof. Zhongqiang Ren
Topic: Multi-Agent Path Finding
Robotics Autonomy and Planning Lab at SJTU
Advisor: Prof. Zhongqiang Ren
Topic: Multi-Agent Path Finding

Undergraduate Research Assistant Jan. 2023 - Jun. 2023
Intelligent Robotics and Machine Vision Lab at SJTU
Advisor: Prof. Hesheng Wang
Topic: Image-Based Visual Servo for Quadrotor
Intelligent Robotics and Machine Vision Lab at SJTU
Advisor: Prof. Hesheng Wang
Topic: Image-Based Visual Servo for Quadrotor
Research
(† denotes equal contributions)
FALCON: Learning Force-Adaptive Humanoid Loco-Manipulation
Yuanhang Zhang, Yifu Yuan, Prajwal Gurunath, Tairan He, Shayegan Omidshafiei, Ali–akbar Agha–mohammadi, Marcell Vazquez-Chanlatte, Liam Pedersen, Guanya Shi▶ TL;DR
FALCON empowers humanoids with robust locomotion and precise manipulation under significant, unknown 3D end-effector forces, via a novel dual-agent force-adaptive RL framework.
Hold My Beer: Learning Gentle Humanoid Locomotion and End-Effector
Stabilization Control
Yitang Li, Yuanhang Zhang, Wenli Xiao, Chaoyi Pan, Haoyang Weng, Guanqi He, Tairan He,
Guanya Shi▶ TL;DR
A slow-fast dual-agent RL framework achieving human-level end-effector stability for humanoids.
ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
Tairan He†, Jiawei Gao†, Wenli Xiao†, Yuanhang Zhang† , Zi Wang, Jiashun Wang, Zhengyi Luo, Guanqi He, Nikhil Sobanbab, Chaoyi Pan, Zeji Yi, Guannan Qu, Kris Kitani, Jessica Hodgins, Linxi "Jim" Fan, Yuke Zhu, Changliu Liu, Guanya Shi▶ TL;DR
ASAP learns agile whole-body humanoid motions via learning a residual action model from the real world to align sim-to-real physics and achieve athletic motions.
Flying Hand: End-Effector-Centric Framework for Versatile Aerial Manipulation Teleoperation and Policy Learning
Guanqi He†, Xiaofeng Guo†, Luyi Tang, Yuanhang Zhang, Mohammadreza Mousaei, Jiahe Xu, Junyi Geng, Sebastian Scherer, Guanya Shi▶ TL;DR
A unified aerial manipulation framework that enhances precision and versatility through an end-effector-centric interface.
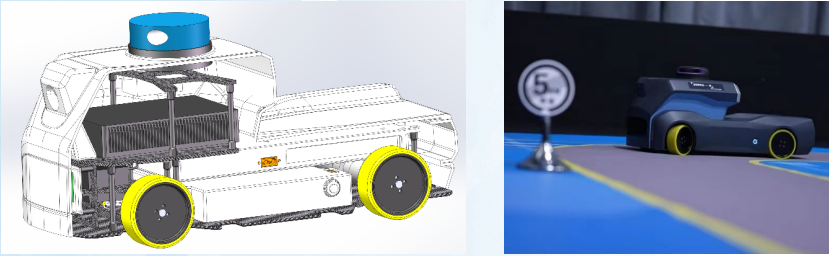
Catch It! Learning to Catch in Flight with Mobile Dexterous Hands
Yuanhang Zhang†, Tianhai Liang†, Zhenyang Chen, Yanjie Ze, Huazhe XuIEEE International Conference on Robotics and Automation (ICRA) 2025
CoRL 2024 Workshop LFDM (Best Paper Nomination)
Links: [arXiv][Website][Code][Twitter]
▶ TL;DR
We build a mobile manipulator with a dexterous hand, and leverage reinforcement learning to train a whole-body control policy for the robot to catch diverse objects randomly thrown by humans.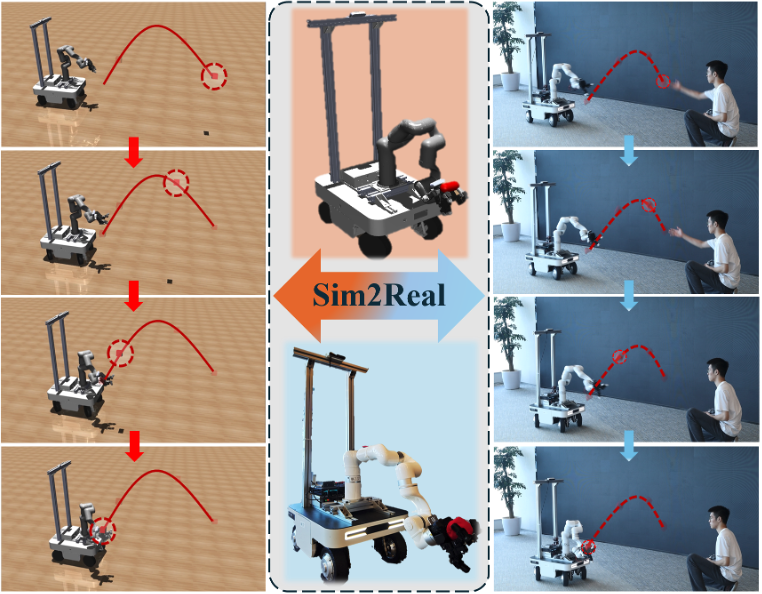
ViTaS: Visual Tactile Soft Fusion Contrastive Learning for Reinforcement Learning
Yufeng Tian†, Shuiqi Cheng†, Tianming Wei, Tianxing Zhou, Yuanhang Zhang, Zixian Liu,
Zhecheng Yuan, Huazhe XuIn Submission for IROS 2025
▶ TL;DR
Introduced ViTaS, a framework using using Soft Fusion Contrastive Learning and a CVAE module to fuse visual and tactile information, achieving state-of-the-art performance with high sample efficiency and low parameter count in robotic manipulation.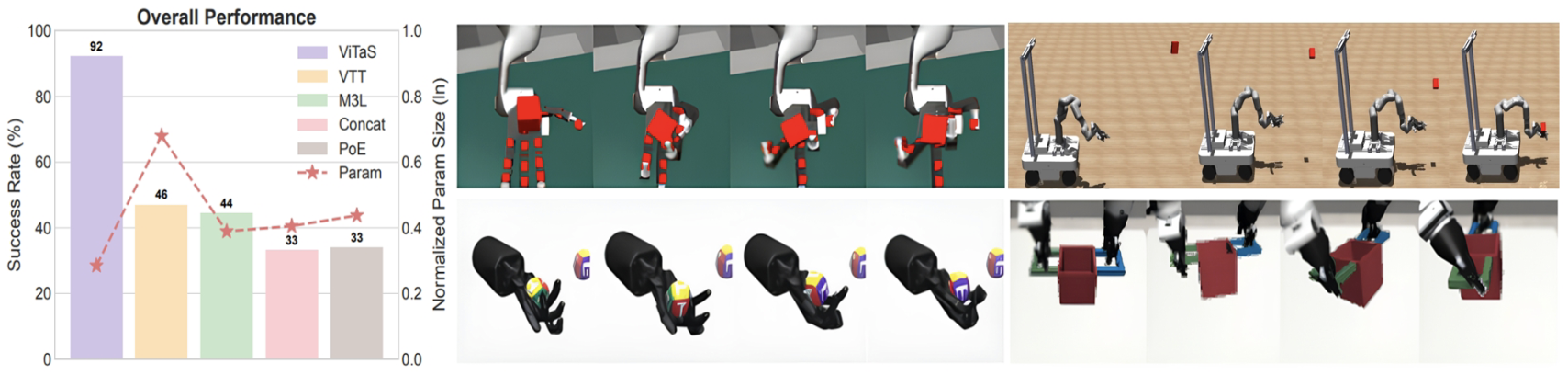
Multi-Agent Combinatorial Path Finding with Heterogeneous Task Duration
Yuanhang Zhang, Xuemian Wu, Hesheng Wang, Zhongqiang Ren
▶ TL;DR
Proposed two conflict-based search methods—CBSS-TPG (conflict-free) and CBSS-D (conflict-free and minimal cost) to solve the multi-agent combinatorial path finding problem with target duration.
Perception-constrained Visual Servoing Based NMPC for Quadrotor Flight
Undergraduate Thesis (A grade TOP 3%), Advisor: Prof. Hesheng Wang
Links: [Code][Video]
▶ TL;DR
Incorporated quadrotor dynamics and visual feature dynamics into NMPC to enable the quadrotor to flight purely based on visual information without localization.
Competitions
UAV Intelligent Perception Technology Competition National Third Prize (10%) |  | Shanghai, China 2022.09-2022.11 |


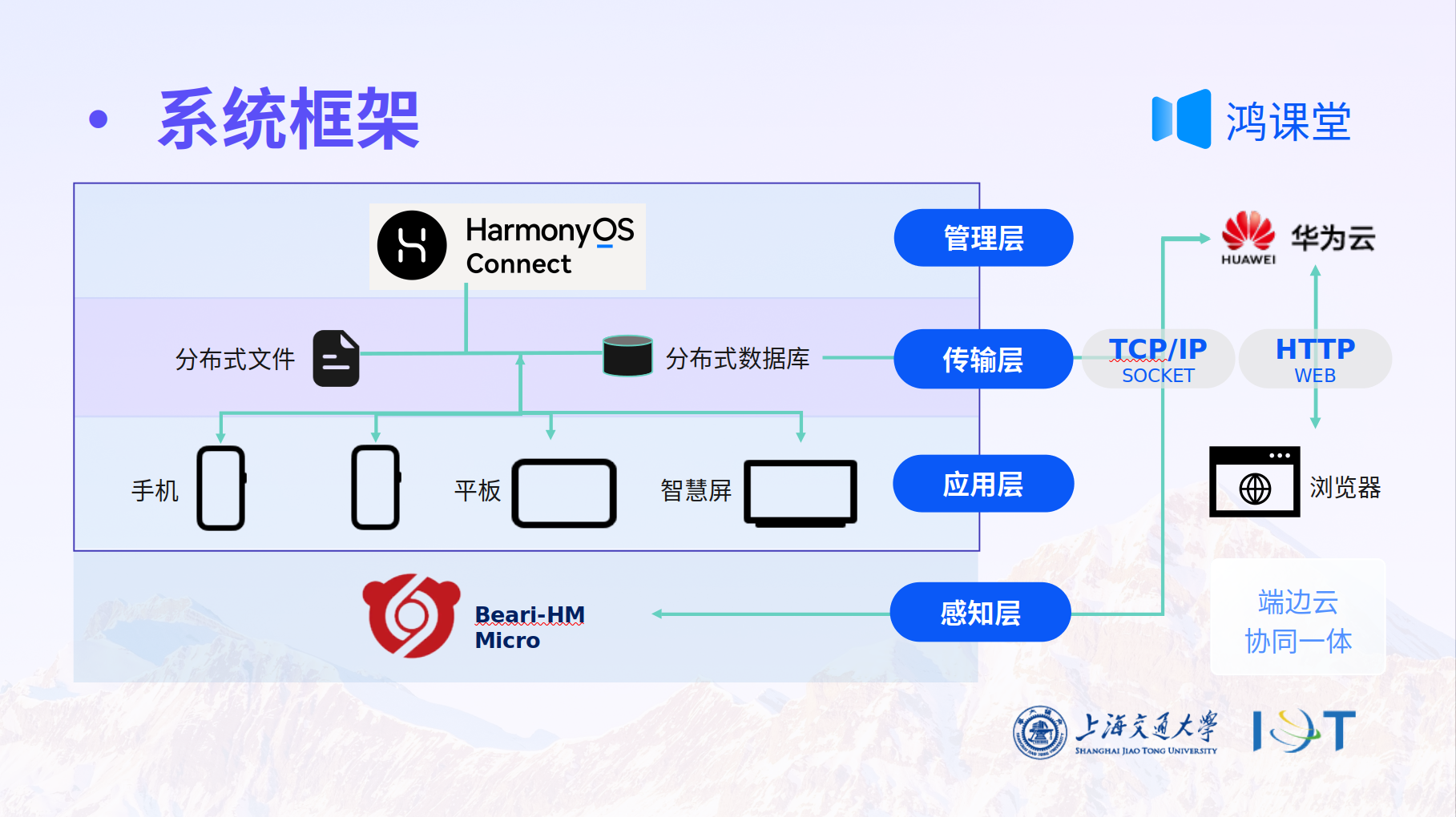
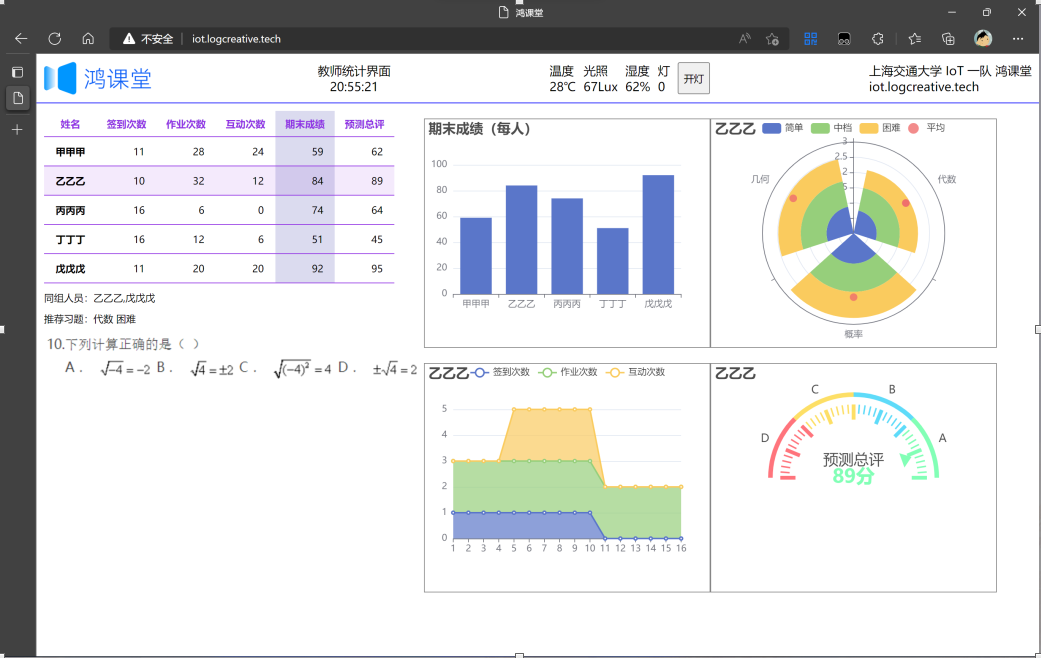
National University IOT Design Competition National First Prize & Harmony Innovation Award (1%) |  | Shanghai, China 2022.06-2022.09 |
Links: [Video]
National University ICT Competition (Innovation) National Second Prize (5%) |  | Shanghai, China 2021.09-2022.01 |
Links: [Video]
Leadership
 | Shanghai, China 2020.03-2022.07 |
Links: [SJTU VEX Change Up Season Reveal 2021]
2021 National VEX Robotics Competition: Tournament Champions & Skills Champion (World Record)
2021 VEX Robotics Competition Asian Open: Tournament Champions VEXU; Excellence Award
2021 VEX Robotics Competition China Final: Tournament Champions VEXU; Excellence Award


Awards
Outstanding Paper Nomination in LFDM Workshop at CoRL 2024
SJTU Outstanding Graduate (top 3%)
SJTU Merit Student (top 3%)
SJTU Academic Progress Scholarship
Service
- Reviewer: ICRA 2025, IROS 2025